Recommend

ADVERTISEMENT

ROS-Mobile
Control and Visualization for the Robot Operating System (ROS).
4.3
Rating
100% Safe
Safety
2.1.0
Version
Libraries & Demo
Category
ROS-Mobile
Developer
2021-06-28
Update on
Editor's Review
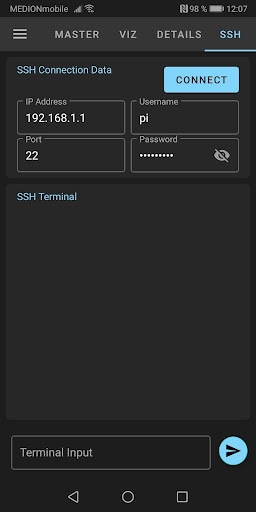
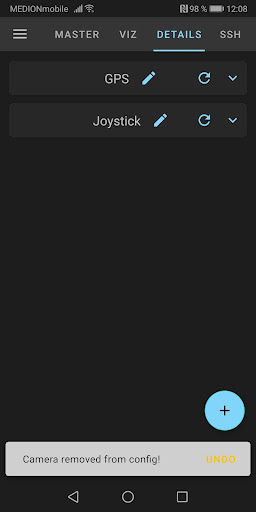
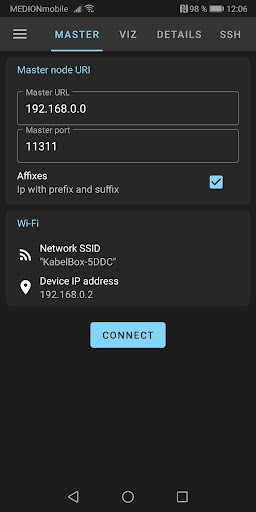
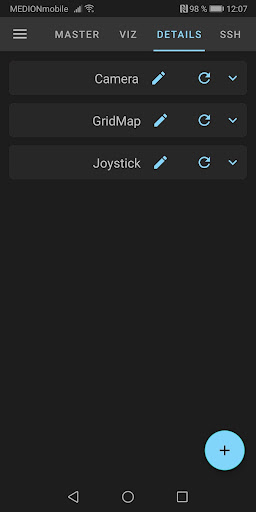
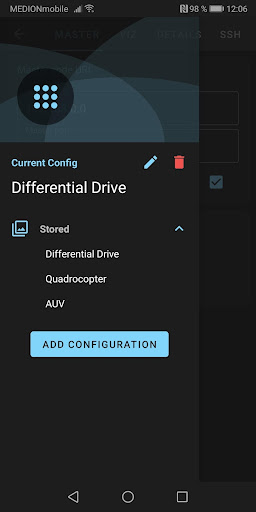
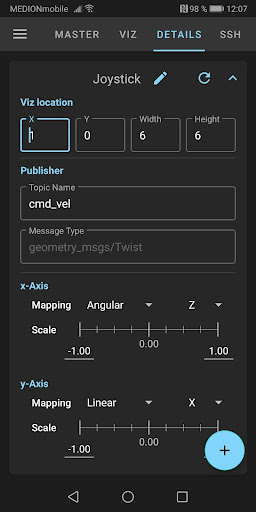
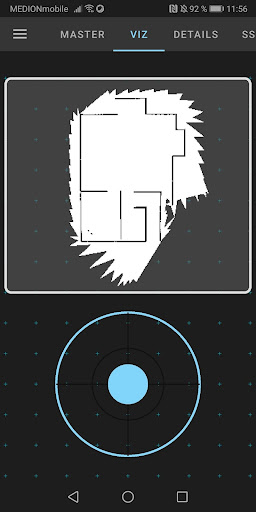
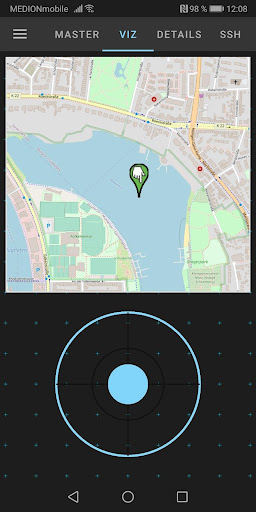
ROS-Mobile is an Android application designed for dynamic control and visualization of mobile robotic system operated by the Robot Operating System (ROS). The application uses ROS nodes initializing publisher and subscriber with standard ROS messages. The overall code architecture pattern is Model View ViewModel (MVVM), which stabilizes the application and makes it highly customizable.
If you use ROS-Mobile for your research, please cite
@article{rottmann2020ros,
title={ROS-Mobile: An Android application for the Robot Operating System},
author={Rottmann, Nils and Studt, Nico and Ernst, Floris and Rueckert, Elmar},
journal={arXiv preprint arXiv:2011.02781},
year={2020}
}
For further details have a look onto our GitHub page (search for ROS-Mobile)
ADVERTISEMENT
Comment
- ★★
- ★★
- ★★
- ★★
- ★★
Please rate this app
Screenshots
Recommend
ADVERTISEMENT